
|
|
文章詳情
機器人機械手具有點位控制的氣動傳動裝置的設計 二維碼
1049
帶循環控制裝置的氣動機器人的定位點數目有限制。而限位開關又是保證定位精度的,用機械裝置作為限位開關時,定點的數目受到限制,這是由于氣動傳動裝置速度太高所致。 若用吸合時間t=0.1~0.2秒的機床氣動配流器,馬達兩個停車點之間最短行程為100毫米。這對馬達對應的速度約為1米/秒。所以工業人執行馬達在這種速度下,一個自由度的停止點數目最多是6~9個(視行程大小而定)。假若利用由幾個行程不同的氣缸串聯而成的位置控制器,那么就可以增加定位點數目。例如,由三個氣缸組成的位置控制器,就可有28=8個定位點。當在工業機器人機械手中采用位置控制器時,應當注意到,在氣缸的最小行程值等于位置控制器的步長的界限內時,不能調整定位點的位置。 目前,世界各國都在研制具有點位控制的氣動機器人。圖1所示為列寧格勒加里寧工學院控制技術研究室研制的,一個自由度的點位控制機器人氣動傳動裝置原理圖。 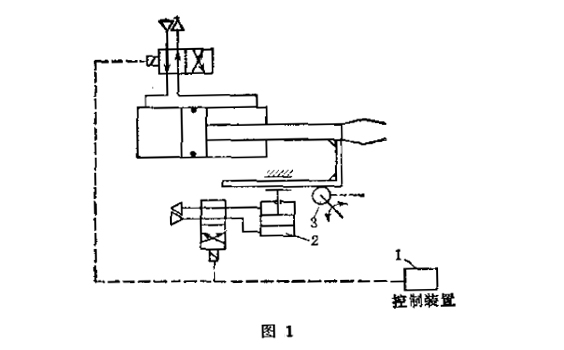 在定位點范圍時,根據反饋傳感器3的信號(參看圖1)利用逆壓實現傳動制動。制動時執行機構運動速度下降。最小的穩定速度,即“爬行”速度,是**工作速度的5~10%。用制動裝置2直接使馬達保持在定位點上。西德的PAT公司研制的、具有點位控制的氣動傳動裝置,用圓盤式電磁制動器保證速度降低到爬行速度。對于具有點位控制的一個自由度的液壓和氣動機器人機械手的價格進行,就可得出結論。氣動的比液壓的幾乎便宜兩倍。 不論是具有循環式的還是具有點位式的控制裝置,機器人的氣動系統均包括有氣動執行馬達、配流器、調節器和能源。 設計氣動機器人的原始數據是執行馬達運動時間(或Vm米/秒)、阻力(或負載)、啟動和制動加速度值。所求的參數是氣缸直徑,管道的過流斷面和安放在氣缸工作腔與主氣路或大氣相通的管路上的裝置的過流斷面。 在氣動馬達中**的困難是確定氣缸中密封裝置(活塞桿和活塞)的摩擦力。對于直徑為50毫米的氣缸,若留有某些保險系數,摩擦力可取為0.25ΡΩ。此處Р是氣源壓力,Ω是活塞面積。假若機器人機械手傳動裝置的活塞和活塞桿重量不超過10~20公斤,則運動部分的質量所引起的計算結果的誤差不會太大。根據要有足夠運動力克服阻力這一條件,可算出一些Ω值。任意取一個Ω值,使它大于計算的Ω值中的最小值。用選擇氣動馬達輸入、輸出端有效過流橫斷面的方法,能夠保證活塞具有給定的運動速度。 動態計算使得每個自由度選擇出的參數更加精確。動態計算也包括確定工作循環時間和確定過渡過程特性。計算時首先要研究準備的數據,其中包括配流器吸合時間,增高壓力后壓力波傳播時間以及當執行機構不動時,氣體充滿動力氣缸工作腔所需的時間。在活塞不動時,用被壓縮的氣體填充動力氣缸的工作腔,一直要充到這個腔內壓力值達到P=F/Ω為止,其中F是總負載,活塞開始移動。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.dfscwgu.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |